
Знакомьтесь: роботы-пылесосы
Утром Незнайку разбудил какой-то подозрительный шум. Открыв глаза, Незнайка увидел на полу, недалеко от кровати, странную маленькую машину, которая ползала по комнате от одной стены к другой и непрерывно жужжала. С виду она напоминала собой черепаху: такая же полукруглая в верхней части и плоская внизу. Сверху в ней была масса мелких дырочек, как в дуршлаге, а снизу ее охватывал блестящий никелированный поясок с более крупными отверстиями в виде глазок. Сбоку красивыми серебряными буквами была сделана надпись: «Кибернетика».
Машина подползла к кровати Пестренького, возле которой валялось множество конфетных бумажек. Она проползла прямо по этим бумажкам туда и сюда – и все бумажки исчезли, будто их и не бывало. После этого машина юркнула под кровать. Некоторое время из-под кровати раздавалось ее гудение.
Машина между тем подползла к двери и засвистела. Дверь отворилась, как по сигналу, и машина поползла в соседнюю комнату. Там она принялась ползать по всему полу, даже под стол залезла, так что в конце концов нигде не оставила ни соринки...
Окончив уборку, машина вылезла на середину комнаты, покрутилась на месте, как бы оглядываясь по сторонам, потом поползла в угол и скрылась за маленькой дверцей, которая имелась в стене у самого пола.
Николай Носов «Незнайка в Солнечном городе» (1958 г.)
Описание машины «Кибернетика», так удивившей Незнайку, Пестренького и Кнопочку, поразительно совпадает с современными роботами-пылесосами. Пожалуй, единственное отличие состоит в том, что те приборы, которые сейчас предлагает нам рынок, не открывают свистком двери комнат и не скрываются за дверцей в стене.

Electrolux Trilobite
Если же говорить о реальной истории роботов-пылесосов, то она началась в 1997 году, когда на телеканале BBC телезрителям был показан прототип подобного устройства, над созданием которого работала компания Electrolux. Через пять лет она выпустила в продажу первый серийный прибор под названием Trilobite. При высоте 13 см и диаметре 35 см аппарат мог перемещаться под кроватями, столами и другой мебелью, ориентируясь в комнате при помощи сонара (акустического радара, работающего на ультразвуковой частоте), как это делает летучая мышь. При разряде аккумулятора Trilobite сам возвращался к базовой станции для подзарядки.

Dyson DC06
В 1999 году компанией Dyson был разработан робот-пылесос DC06, однако его массовое производство не было развернуто (см. Dyson раскрывает секреты. Часть 1: этапы славного пути ). В 2002 году американской компанией iRobot Corporation был представлен прототип пылесоса Roomba, серийный выпуск которого начался несколькими годами позже. Новое направление показалось очень перспективным, и в начале тысячелетия роботы-пылесосы стали выпускать компании Kärcher (модель RoboCleaner RC 3000), Applica (модель Zoombot RV500), Samsung (модель VC-RP30W), LG (модель ROBOKING), BSH (модель Siemens Sensor Cruiser) и Sharper Image Design (модель eVac). Чуть позже к ним присоединились фирмы Infinuvo, Hitachi и Panasonic. Однако первоначальный энтузиазм вскоре поутих: оказалось, что для того, чтобы создать действительно эффективный робот-пылесос, необходимы мощные аккумуляторные батареи, обеспечивающие достаточный ресурс автономной работы прибора, а также совершенная система навигации, позволяющая ему выполнять уборку в помещении любой геометрии. Одни производители совсем охладели к роботам-уборщикам, другие отложили работу над ними на будущее. Так, компания Dyson в начале 2014 года составила инвестиционный план на пять лет, согласно которому предполагается уже сейчас вложить около 8 млн. евро в разработку роботизированных бытовых приборов, и ещё около 4,5 млн. евро в течение ближайших трех лет.
Знакомство на даче
Для того, чтобы получше познакомиться с роботами-пылесосами, мы собрали их в дачном доме – здесь оперативный простор побольше, чем в городской квартире, а в стыках между досками пола достаточно мелкой пыли и опилок. Наш обзор не преследует целей сравнения – мы просто попытались выявить «почерк» каждой из моделей (Ariete 2711 Briciola, iClebo Arte, LG Hom-Bot Square VR 6270LVM, Samsung Navibot-S 8980 и Kärcher RC 4.000), взяв от них световые автографы на память, и выявить общие черты их поведения. Что касается еще одной модели – Miele Scout RX1 – то знакомство с ней состоялось в московском офисе Miele, поскольку на момент написания статьи данный пылесос еще только готовился к выходу на российский рынок.
Ariete 2711 Briciola: «Светлячок» выходит на уборку
Начнем с нашего давнего знакомого – робота Ariete 2711 Briciola, который, наоборот, представлен на нашем рынке уже около двух лет (см. Briciola, который ходит сам по себе ). Самый доступный по цене из перечисленной команды, он является и самым шумным, но при этом развивает приличную скорость – до 20 м/мин. С помощью пульта дистанционного управления «Светлячку» (так переводится с итальянского слово Briciola) можно задать режим движения по спирали, по периметру или по прямой (по диагонали помещения).

Ariete 2711 Briciola на зарядной станции
Чтобы изучить логику поведения роботов-пылесосов, мы подготовили для них простой тест: накрыв кровать одеялом, мы на одной стороне спустили его край почти до самого пола, а на другом подняли примерно до высоты корпуса робота (для наших моделей она составляла от 8 до 10,5 см). Станет ли плотное, но мягкое одеяло непреодолимым препятствием для прохождения робота под кровать?
Есть такая история: когда в СССР разрабатывали первую автоматическую станцию для посадки на Луну, бурные споры вызвал предположительный характер лунной поверхности. Одни ученые считали, что Луна покрыта толстым, в несколько метров, слоем пыли, другие – что породами, напоминающими земные туфовые. Ситуация зашла в тупик, надо было принимать решение, и тогда во время одной из дискуссий С.П. Королев взял лист бумаги, начертал категорическое: «Луна твердая», и подписался.
Так вот, оказалось, что для большинства испытанных нами моделей свисающий до пола край одеяла является «твердым», и проникнуть под кровать в этом месте они наотрез отказывались. И очень хорошо! Это говорит о том, что данное препятствие четко идентифицируется либо ультразвуковыми сенсорами, либо бампером, который служит датчиком высоких препятствий.

Ariete Briciola доходит до края одеяла…

…и поворачивает прочь от кровати
Что же касается связи с зарядной станцией («базой»), то она производится с помощью сигнала в инфракрасном диапазоне. Поэтому пылесос и станция должны находиться в одном помещении (впрочем, это относится и к другим моделям роботов-пылесосов). На наш взгляд, слабым местом данной модели является тонкий шнур питания, идущий к станции от адаптера, который включается в электрическую розетку. При уборке пылесос иногда запутывается вращающимися щетками в собственном шнуре, и приходится вызволять его из плена.

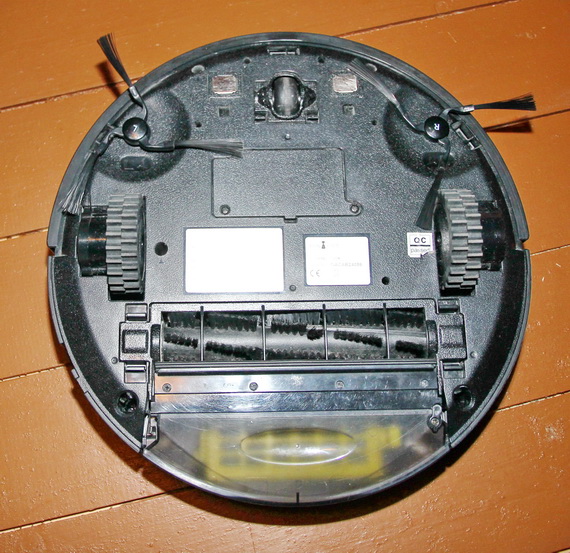
«Светлячок» перевернут на спинку. На его «брюшке» мы видим (сверху вниз) датчик низких препятствий, вращающиеся щетки, крышку аккумуляторного отсека (между щетками), всасывающее отверстие и переключатель ВКЛ/ВЫКЛ.

Открыв крышку на «спинке», можно извлечь контейнер для сбора пыли. В стенку контейнера вставлен НЕРА фильтр (еще один прилагается в комплекте).
Простая и надежная модель (у «Светлячка» нет никаких камер, снимающих «карту» помещения), Ariete 2711 Briciola является отличным вариантом бюджетного робота-пылесоса.
iClebo Arte: камера смотрит вверх
Гораздо более «продвинутым» (и при этом не запредельно дорогим) является корейский робот-пылесос iClebo Arte, оснащенный тремя вычислительными блоками, каждый из которых отвечает за решение своей задачи: Control MCU (Micro Controller Unit) – за управление движением прибора, Vision MCU – за работу камеры, и Power MCU – за эффективное использование ресурсов аккумулятора. Шутки в сторону: вычислительные блоки пылесоса iClebo Arte обрабатывают 10 800 вычислительных операций в секунду.
Используя такой мощный вычислительный комплекс, а также информацию от двух десятков датчиков препятствий, расположенных на передней и боковой поверхности бампера и на нижней части корпуса, встроенный картограф пылесоса успешно ориентирует его в пространстве. По заявлению производителя, модель способна справиться с уборкой даже в многокомнатных домах со сложной структурой помещений площадью до 140-150 кв. м. Среди доступных режимов уборки – Авто, Случайный, Локальный, Максимальный и Полотер (о нем чуть позже).

iClebo Arte на зарядной станции

Сенсорный ЖК дисплей на верхней стороне корпуса iClebo Arte: видны видеокамера и цифровой индикатор (в данный момент он отображает время, прошедшее от начала уборки – 8 минут). Пылесосом можно управлять как с помощью дисплея на корпусе, так и от пульта.
Карта помещения строится с помощью видеокамеры, сканирующей потолок со скоростью до 24 кадров в секунду – это позволяет прибору «запомнить» точную конфигурацию комнаты, включая стыки стен и расположения перегородок. Пылесос может преодолевать пороги высотой более 20 мм, а датчики пола не позволяют ему упасть в лестничный пролет.
А как он поведет себя в экстремальных условиях? Запустим-ка его под кровать, где темно и пыльно. Выполнив условие «одеяло твердое», робот заползает в темноту под высоко поднятым краем одеяла и начинает активно действовать. Получается, дневной свет ему не так уж нужен – сенсоры работают в невидимом глазу ИК диапазоне, а механические датчики на бампере вносят дополнительный вклад в построении картины «мира под кроватью». Закончив дело (кстати, на том же месте пола, где и начинал), пылесос без колебаний находит зарядную базу, не блуждая по комнате. Скорость движения у него, правда, поменьше, чем у итальянского «Светлячка» (15 м/мин), но для уборки этого вполне достаточно.

Вспышка фотоаппарата на мгновение выхватывает пылесос в процессе уборки под кроватью – темнота ему совсем не помеха
Съемные вращающиеся щетки iClebo Arte снабжены маркировкой «левая» и «правая». Вращаясь, щетки собирают с пола пыль и направляют ее к основной щетке на «корме», которая заметает пыль в контейнер

iClebo Arte с пультом дистанционного управления и контейнером для сбора пыли, который выдвигается из «кормовой» части корпуса. Контейнер имеет резиновый скребок, которым можно собрать пыль с пола.

Кроме щеток, в ареснале iClebo Arte есть съемное орудие уборки – швабра для протирки пола влажной салфеткой из микрофибры. Пылесос может работать в режиме всасывания и одновременно протирать пыль за собой. Мойку пола это, конечно, не заменит, но люди с повышенной реакцией на пыль оценят такой режим полотера.

И еще один полезный аксессуар – виртуальная стена (магнитная ограничительная лента)

Установив ленту поперек дверного проема, мы преграждаем роботу путь в соседнее помещение
LG Hom-Bot: одна камера – хорошо, а две - лучше
Первое, что бросается в глаза при взгляде на пылесос LG Hom-Bot Square VR 6270LVM – особая форма корпуса. Это не диск, как другие аппараты, а скорее квадрат со скругленными углами. В итоге, с учетом того, что в этой модели вращающиеся щетки стали длиннее на 1,5 см, робот гораздо лучше справляется с уборкой пыли из углов и вдоль стен.
Другое отличие сразу не заметишь, но оно очень существенно: робот оснащен не одной, а сразу двумя камерами (система Dual Eye 2.0™). Верхняя камера называется II-SLAM (англ. Illumination Invariant based Simultaneous Localization and Mapping – одновременные локализация и картирование вне зависимости от освещения). Она сканирует потолок, подстраивая свою чувствительность под освещенность в комнате. Благодаря этому пылесос отлично ориентируется даже в темноте, в чем мы и убедились, направив его под кровать.
Вторая камера под названием OFS (англ. Optical Flow Sensor – оптический датчик светового потока) смотрит в пол, следя за изменениями характера поверхности и отсчитывая пройденный роботом путь. Это позволяет пылесосу распознавать изменение покрытия поверхности, включая турбо-режим на ковре, и прокладывать наиболее эффективный маршрут уборки, не возвращаясь на уже пройденное место, а после паузы продолжать работу там, где она была прервана.
Есть и третья особенность – пылесос разговаривает! В первый раз это звучит очень неожиданно, но постепенно привыкаешь к произносимым женским голосом сообщениям типа «Выполняется уборка в режиме Клетка за клеткой». При желании звук, конечно, можно отключить, а вот сменить голос с женского на мужской – нет. А почему бы производителю было не предусмотреть такую возможность, чтобы порадовать хозяек сочным баритоном?

LG Hom-Bot Square VR 6270LVM на зарядной станции

Уборка под кроватью закончена!

Камера II-SLAM смотрит в потолок. Под камерой на бампере расположены ультразвуковые сенсоры, которые помогают роботу минимизировать столкновения с другими объектами. Ультразвуковые сенсоры являются более точными и «видят шире», чем инфракрасные, которые не способны распознать прозрачные предметы или предметы, поглощающие свет.

Робот перевернут на спинку

Сенсор нижней камеры OFS, направленный в пол

Вращающиеся щетки направляют пыль к основной щетке, которая сметает ее в контейнер

Для извлечения контейнера нужно открыть крышку на верхней стороне корпуса

Воздух, поступающий в контейнер, проходит через этот фильтр НЕРА 11
В пылесосе предусмотрено четыре режима уборки – Пятно, Клетка за клеткой, Зиг-заг и Мое место. Если нужно не просто пропылесосить, но и протереть пол, на днище корпуса укрепляется насадка из микрофибры (в этой модели производитель увеличил ее размер в 2,5 раза), причем замену насадки можно выполнить, не переворачивая робота.
Samsung NaviBot-S SR 8980: база принимает пыль
«Ого!» – сказали мы, когда извлекли эту модель из коробки. – «Какая огромная зарядная станция!» И в самом деле: робот-пылесос Samsung NaviBot-S имеет внушительную базу, которая служит не только для подзарядки аккумуляторной батареи, но и для приема пыли, собранной мобильным блоком. По сути, это два пылесоса в одном: первый, мощностью 40 Вт, перемещается по комнате и собирает пыль в контейнер объемом 0,5 л, а второй, мощностью 600 Вт, перекачивает эту пыль в контейнер базы емкостью 2 л. Благодаря такой перегрузке можно реже заниматься не слишком приятной процедурой опоражнивания контейнера, а робот совершит больше циклов уборки, пока не будет заполнен основной контейнер (по заявлению производителя – до нескольких дней).
Собственно, с перекачки пыли и начинается работа прибора. Этот процесс сопровождается довольно громким ревом, поэтому надо иметь в виду: паспортные 60 дБ при движении робота по полу – это одно, а звук при приеме пыли в базовый контейнер – совсем другое.

Samsung NaviBot-S SR 8980 на зарядной станции

Корпус станции разделяется на две половинки…

…одна из которых представляет собой контейнер для пыли емкостью 2 л

NaviBot-S идет в атаку на пыль. Хорошо видна камера, направленная в потолок комнаты.

Робот Samsung оказался самым тонким среди участников нашего обзора (его высота 8,0 см), поэтому прошел под кромкой одеяла примерно по центру кровати

Уже знакомая нам конфигурация: две вращающиеся щетки и основная (приводная) щетка, направляющая пыль в контейнер
Помимо направленной в потолок камеры, робот имеет 12 оптических сенсоров препятствий и два микропроцессора – всё это оборудование составляет систему визуального картографирования Visionary Mapping™ System, с помощью которой робот выбирает оптимальный маршрут движения. У прибора есть несколько режимов работы:
- Auto (Авто) – автоматическая уборка всех комнат;
- Spot (Область) – интенсивная очистка определенного места размером 1,5 х 1,5 м (например, чтобы собрать крошки хлеба или печенья);
- Max (Максимум) – уборка до тех пор, пока батарея почти не разрядится;
- Manual (Ручной) – уборка по вводимым с пульта командам «Вправо», «Влево», «Вперед» (вот только команду «Назад» дать нельзя);
- Turbo (Турбо) – приводная щетка вращается с максимальной скоростью;
- Dust Sensor (Датчик пыли) – пылесос начинает интенсивно очищать окружающую его область, зарегистрировав наличие пыли с помощью оптического датчика;
- Timer (Таймер) – пылесос выполняет уборку на полу в заранее установленное время;
- Weekly Schedule (Расписание на неделю) – уборка по расписанию начинается с установленного времени в определенный день недели.
Пылесос оснащен тремя датчиками ступенек (Cliff Sensors), с помощью которых он определяет края ступенек и других препятствий в виде углублений. Встретив на своем пути порог высотой до 1,5 см, робот преодолевает его благодаря специальной конструкции колеса (Smooth Climbing Wheel). А если, наоборот, нужно, чтобы робот не прошел в соседнюю комнату? Тогда на помощь приходит специальный аксессуар Virtual Guard™, создающий на его пути виртуальную стену протяженностью не менее 2,5 м.

Модуль Virtual Guard™ (виртуальный ограничитель) не позволяет роботу NaviBot-S пройти в запретную для него зону
Kärcher RC 4.000: с независимым характером
Еще одна модель, в которой предусмотрена перегрузка собранной пыли из мобильного робота в контейнер на зарядной базе – Kärcher RC 4.000 (кстати, происходит это столь же громко, как у пылесоса Samsung, да и мощность базового пылесоса такая же – 600 Вт). В отличие от Samsung, где пылесос базового блока – циклонного типа, здесь используется классический бумажный мешок.

Kärcher RC 4.000 на зарядной станции

Сбор пыли в базовом блоке производится в бумажный мешок

Мешок для сбора пыли
С точки зрения геометрии это, наоборот, самый высокий из роботов, представленных в нашем обзоре (10,5 см), а с точки зрения поведения он оказался и самым «норовистым». Во-первых, у этой модели нет пульта дистанционного управления, и все команды вводятся с помощью панели управления на базе. Нет и видеокамер – для навигации пылесос использует инфракрасный луч, позволяющий ему вернуться к зарядной станции. Перемещение мобильного блока происходит по принципу случайных столкновений: наткнувшись на препятствие, он изменяет направление движения под произвольным углом и снова движется прямо до тех пор, пока не натолкнется на очередное препятствие. При работе пылесос использует оптические датчики (датчики падения), которые распознают лестницы и лестничные пролеты, тем самым предотвращая его падение.

Робот Kärcher RC 4.000 – вид сверху
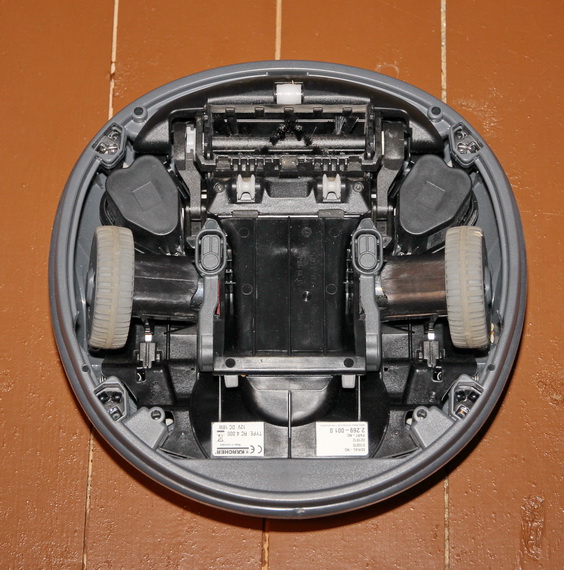
Робот Kärcher RC 4.000 – вид снизу. Вращающихся щеток здесь нет, только приводная щетка.

Панель управления на корпусе зарядной станции. Нажата кнопка «Парковка робота-пылесоса», но он и не думает возвращаться на станцию.

Край одеяла проходит ниже «макушки» робота, но это не останавливает его движения
Модель удивила нас независимым характером поведения. Например, подзарядившись, она самостоятельно отправлялась на уборку, хотя никаких команд делать это не поступало (похоже, что они и не предусмотрены). А остановить рьяного уборщика можно только с помощью тумблера питания на корпусе: на панели управления есть кнопка «Парковка робота-пылесоса», но прибор упрямо игнорировал активацию этой команды и на базу вернуться не пожелал.
Ну, а то, что край одеяла не остановил пылесос в его стремлении забраться под кровать – ничего удивительного: ультразвуковых датчиков препятствий у него нет, также как и подпружиненного переднего бампера, как у других моделей.
В память аппарата записано четыре программы движения, благодаря чему он может автоматически настраиваться на различные степени загрязнения пола – чем грязнее пол, тем интенсивнее уборка. Выбор программы движения осуществляется автоматически с помощью датчиков, находящихся в базовом резервуаре для пыли, причем робот делает выбор сам, без оповещения владельца:
- обычная уборка (движение по случайному принципу с обычной скоростью);
- отдельные участки с обычным уровнем загрязнения (медленный проход через загрязненный участок);
- отдельные участки с более высоким уровнем загрязнения (медленный проход вперед/назад по загрязненному участку);
- сильно загрязненные участки большой площади (медленные, расходящиеся лучами проходы в виде звезды через загрязненный участок).
Кроме того, с помощью панели управления можно задать продолжительность уборки:
- 3 часа – для помещений площадью менее 45 кв.м;
- 6 часов – для помещений площадью 45 - 90 кв.м;
- 9 часов – для помещений площадью 80 - 135 кв.м;
- режим непрерывной уборки (устанавливается по умолчанию).

С этого небольшого порожка робот съехал вниз, но уже не смог подняться обратно
Что касается проходимости, то она оставляет желать лучшего: робот способен преодолевать отдельные электрические кабели и дверные пороги высотой не более 10 мм. На сильно загрязненных поверхностях и коврах с высотой ворса более 20 мм он сокращает скорость перемещения в два раза. Если высота уступа перехода между комнатами составляет от 2 до 8 см, робот, как правило, съезжает вниз, но не поднимается вверх. В нашем случае так и произошло – прибор «завис» в небольшом коридорчике на входе в комнату.
С учетом сказанного не вполне понятно ценовое позиционирование модели Kärcher RC 4.000 – она дороже аналогичного робота Samsung NaviBot-S, хотя уступает ей по ряду показателей.
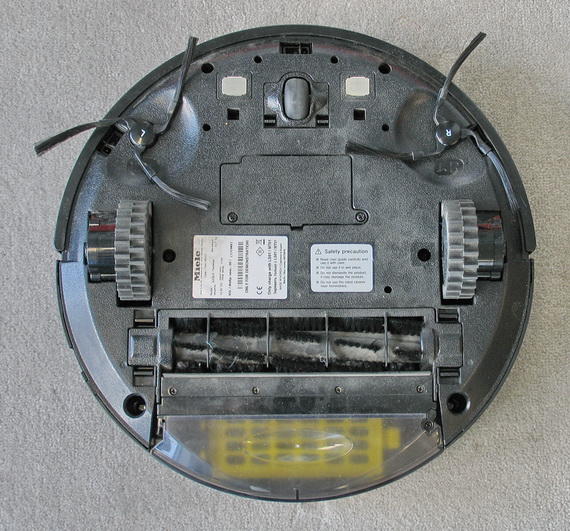
Miele Scout RX1: пополнение в славном семействе
Немецкая компания Miele – один из старейших европейских производителей пылесосов: их производство под этой маркой началось еще в 1927 году на заводе компании в г. Билефельд. В этом году в обширном ассортименте пылесосов Miele впервые появляется робот-пылесос: это модель Scout RX1 с контейнером для сбора пыли емкостью 0,6 л, анонс которой состоялся на международной пресс-конференции IFA в апреле этого года (см. IFA: прелюдия к берлинской выставке). Новинка от Miele оснащена системой навигации с гироскопическим датчиком и инфракрасной камерой, считывающей карту помещения с потолка. На борту робота – семь ультразвуковых датчиков, исключающих столкновения с мебелью и стенами, три датчика, препятствующих падению с высоты, и литий-ионная батарея, заряда которой хватает на 120 минут работы (этого достаточно, чтобы убрать до 150 кв.м пола).
Робот-пылесос имеет четыре режима работы:
- Авто (планомерный обход помещения зигзагом);
- Пятно (Spot) – уборка в пределах квадрата 1,8 х 1,8 м;
- Турбо – ускоренный режим уборки;
- Угол (Corner) – после уборки в режиме Авто пылесос дополнительно проходит по всему периметру помещения, собирая пыль в углах.
Прибор идеально круглой формы выполнен в строгом дизайне, который сейчас принят для всей бытовой техники Miele.

Miele Scout RX1 на зарядной станции

Панель управления и камера, сканирующая потолок

Ультразвуковые датчики на переднем бампере пылесоса
Нижняя часть пылесоса: видны вращающиеся щетки и приводная щетка

Контейнер для сбора пыли извлекается со стороны «кормы»

Фильтр контейнера для сбора пыли

Ультразвуковые датчики не позволяют пылесосу упасть с края стола…

…и заставляют его остановиться перед одеялом: оно для робота «твердое»

Опора стола – не помеха в движении

Пульт дистанционного управления и зарядная станция
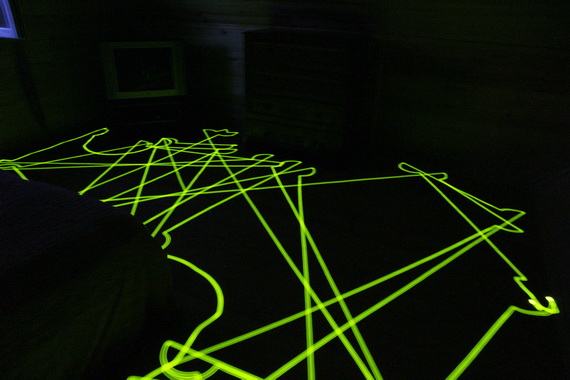
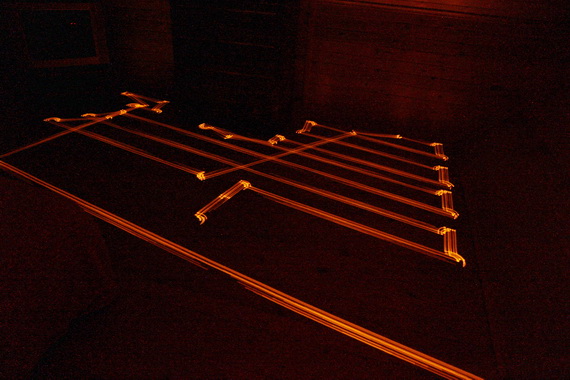
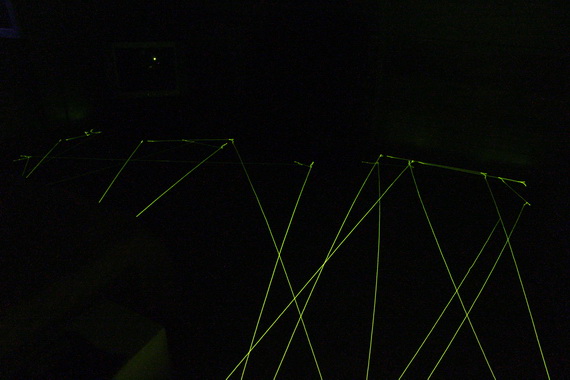
Световой автограф на память
Познакомившись с несколькими роботами-пылесосами, мы решили взять у них памятный росчерк, который оставляют в темноте индикаторы на корпусе. Для этого в комнате выключался свет, а фотокамера переводилась в режим длительной выдержки (около 5 мин). Заметим, что при этой съемке каждый из роботов впервые оказывался в данном помещении (все предыдущие тесты проводились в другой комнате), и поэтому не имел возможности предварительно составить его карту. Давайте посмотрим на эти траектории движения, уникальные для каждой модели.

Комната, где двигались роботы – снимок при свете
Ariete 2711 Briciola – режим хаотического движения

Ariete 2711 Briciola – режим движения по спирали

iClebo Arte

LG Hom-Bot Square VR 6270LVM
Samsung NaviBot-S SR 8980
Kärcher RC 4.000
Итак, перед нами прошли, оставив на память световые автографы, несколько роботов-пылесосов. Как видим, среди них есть модели, способные сориентироваться в вашей квартире и взять на себя повседневную заботу об ее чистоте. Именно такое поддержание порядка в доме – и есть основная функция этих устройств, которые не стоит рассматривать как средство для генеральной уборки. Ну, а стоят ли они тех денег, которых за них просят – решать вам.
Технические характеристики и цены
|
Модель |
Емкость пыле-сборника, л |
Габариты (ВхШхГ), см |
Масса, кг |
Время зарядки, мин |
Время работы, мин |
Уровень шума, дБ |
Цена, руб |
|
Ariete 2711 Briciola |
0,5 |
9,4х34х34 |
3,0 |
210 |
90 |
68 |
12 000 |
|
iClebo Arte |
0,6 |
8,9х34х34 |
2,8 |
100 |
160 |
55 |
19 600 |
|
LG Hom-Bot Square VR 6270LVM |
0,6 |
8,9х34х34 |
3,0 |
180 |
100 |
60 |
25 500 |
|
Samsung NaviBot-S SR 8980 |
0,5/2,0* |
8,0х35х35 |
3,82 |
180 |
100 |
60 |
30 950 |
|
Kärcher RC 4.000 |
0,2/2,0* |
10,5х28х28 |
2,0 |
20 |
60 |
54 |
37 490 |
|
Miele Scout RX1 |
0,6 |
8,9х35х35 |
2,9 |
120 |
120 |
60 |
36 990 |
* - в зарядной базе
